Diffeomorphic Flow
The image below shows the relationship between velocity and a transformation. In the demo on page 3, we saw how this relationship manifests itself in a subgroup of 2x2 matrices. To solve the image matching problem, however, we are interested in much more complex groups.
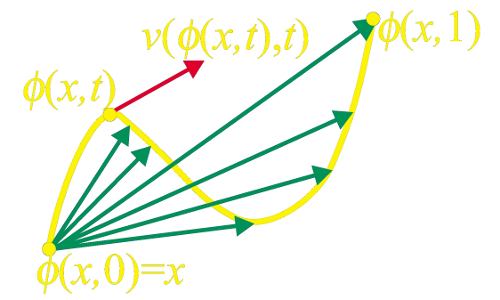
The group that we are interested in is the group of diffeomorphisms, a diffeomorphism being a one-to-one and onto function between two manifolds that both is smooth and has a smooth inverse. While there are many paths through the group of diffeomorphisms that will transport us from a template to target image, we are interested in finding the "best" such path since the calculations involved are very computationally intensive.
This best path is what is called a geodesic. Geodesics are found by minimizing the energy that it takes to travel between two points. For example, airplane pilots fly along arcs around the earth that minimize the distance and thus energy needed to travel. The same principle of energy minimization is at work; the only difference is that the energy being minimized is a much more abstract one, measuring the cost of a path from template to target image through the group of diffeomorphisms.