Diffeomorphic Mapping and Shape
Analysis
Over the past 20 years, a last collection of work has been dedicated
to the definition of shape, and shape spaces, as mathematical
objects, and to their applications to various domains in computer
graphics and design, computer vision and medical imaging. In this
last context, an important scientific field has emerged, initiated
by U. Grenander and M. Miller, called Computational Anatomy. One of
the primary goals of computational anatomy is to analyze diseases
via their anatomical effects, i.e., via the way they affect the
shape of organs. Shape analysis has demonstrated itself as a very
powerful approach to characterize brain degeneration resulting from
neuro-cognitive impairment like Alzheimer's or Huntington's, and
has contributed to deeper understanding of disease mechanisms at
early stages.
Whether represented as a curve, or a surface, or as an image, a
shape requires an infinite number of parameters to be
mathematically defined. It is an infinite-dimensional object, and
studying shape spaces requires mathematical tools involving
infinite-dimensional spaces (functional analysis) or
manifolds (global analysis). Some example are reviewed in
the excellent survey paper from Bauer
et al..
Spaces emerging from Grenander's Pattern Theory have a
special interest, because of their generality and flexibility.
These spaces derive from the structure induced by groups of
diffeomorphisms through the deformation induced by their actions
on shapes. In this context, a shape is not represented as such but
as a deformation of another (fixed) shape, called template. The
deformable template paradigm is rooted in the work of
D'Arcy-Thompson in his celebrated treatise (On Growth and
Form), and developed in Grenander's theory. Even if
Pattern Theory can be more general, recent models of deformable
templates in shape analysis focus on deformations represented by
diffeomorphisms acting on landmarks, curves, surfaces or other
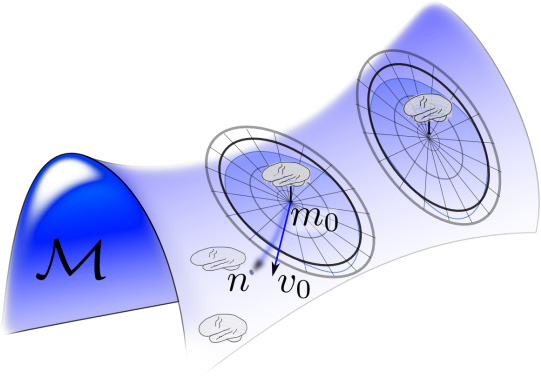
structures that can represent shapes. More precisely, if $T_0$ is
the template, one represents shapes via the map $\pi(\varphi) =
\varphi \cdot T_0$, which denotes the action of a diffeomorphism,
$\varphi$ on $T_0$ ($\varphi$ being a diffeomorphism in the
ambient space, in contrast to changes of parametrization, which
are diffeomorphisms of the parametrization space). With this
model, the diffeomorphism can be interpreted as an extrinsic
parameter for the representation.
Letting $\mathrm{Diff}$ denote the space of diffeomorphisms, and
$\mathcal Q$ be the shape space, one can use the transformation
$\pi : \mathrm{Diff} \to \mathcal Q$ to "project" a
mathematical structure defined on diffeomorphisms to the shape
space. Using this paradigm, one can, from a single modeling effort
(on $\mathrm{Diff}$) design many shape spaces, like spaces of
landmarks, curves surfaces, images, density functions or measures,
etc.
The space of diffeomorphisms, which forms an algebraic group,
is a well studied mathematical object. The relationship between
right-invariant Riemannian metric on this space and classical
equations in fluid mechanics has been described in V.I. Arnold's
seminal work, followed by a large literature, by J.E. Marsden, T.
Ratiu, D.D. Holm and others. It is remarkable that the same
construction induces interesting shape spaces leading to concrete
applications in domains like medical image analysis.
Because the transformation $\varphi \rightarrow \pi(\varphi)$ is
many-to-one in general, the projection mechanism from
$\mathrm{Diff}$ to $\mathcal Q$ involves an optimization step over
the diffeomorphism group: given a target shape $T$, one looks for
an optimal diffeomorphism $\varphi$ such that $\pi(\varphi) =
\varphi\cdot T_0 = T$. Shapes are then compared by comparing these
optimal diffeomorphisms, or some parametrization that
characterizes them. Optimality is based on the Riemannian metric
on $\mathrm{Diff}$, and more precisely on the distance between
$\varphi$ and the identity mapping $\mathrm{id}$ for this metric.
The resulting $\pi$ then has the properties of what is called a Riemannian
submersion. Because the constraint $\pi(\varphi)=T$ is hard
to achieve numerically in general, one preferably replaces this
constraint by a penalty term in the minimization, so that
the diffeomorphism representing a shape is sought via the
minimization of
\[
\varphi \mapsto \mathrm{dist}(\mathrm{id}, \varphi) + \lambda
E(\varphi\cdot T_0, T)
\]
where $E$ is an error function. This formulation leads to the
LDDMM (large deformation diffeomorphic metric mapping) algorithm,
first introduced for landmarks and images, then for curves and
surfaces. In this approach, the optimal $\varphi$ is
computed as the flow of an ODE (ordinary differential equation),
so that $\varphi(x) = \psi(1,x)$ with
\[
\frac{d\psi}{dt}(t,x) = v(t, \psi(t,x))
\]
where $v$ is a time-dependent vector field in the ambient space.
The problem can then be reformulated as an optimal control
problem where $v$ is the control, minimizing
\[
(v , \psi) \mapsto \int_0^1 \|v(t, \cdot)\|^2_V dt + E(\psi(1,
\cdot)\cdot T_0, T)
\]
subject to $\frac{d\psi}{dt}(t,x) = v(t, \psi(t,x))$, where
$\|\cdot\|_V$ is a norm over a Hilbert space $V$ of smooth vector
fields (e.g., reproducing kernel Hilbert space). Introducing the
time variables results in a continuous deformation from the
template to the target.
More details can be found in the following papers, and in other
works of M.
Miller, S.
Joshi, A.
Trouv�, J.
Glaun�s, D.D.
Holm, F-X Vialard,
S.
Durleman etc.
Matching
deformable objects, A Trouv�, L Younes, Traitement du Signal
20 (3), 295-302, 2003
The
metric spaces, Euler equations, and normal geodesic image
motions of computational anatomy, M.I. Miller, A. Trouv�, L.
Younes, Image Processing, 2003. ICIP 2003. Proceedings. 2003
International Conference on, 2003
Computing large deformation metric mappings via geodesic flows
of diffeomorphisms, M.F. Beg, M.I. Miller, A. Trouv�, L.
Younes, International journal of computer vision 61 (2), 139-157,
2005
The Euler-Lagrange equation for interpolating sequence of
landmark datasets, MF Beg, M Miller, A Trouv�, L Younes,
Medical Image Computing and Computer-Assisted Intervention-MICCAI
2003, 918-925, 2003
On the metrics and Euler-Lagrange equations of computational
anatomy, MI Miller, A Trouv�, L Younes, Annual review of
biomedical engineering 4 (1), 375-405, 2002
Diffeomorphic matching of distributions: A new approach for
unlabelled point-sets and sub-manifolds matching, J.
Glaunes, A. Trouv�, L. Younes, Computer Vision and Pattern
Recognition, 2004. CVPR 2004. Proceedings of the 2004 IEEE
Computer Society Conference on, 2004
Large
deformation diffeomorphic metric mapping of vector fields,
Y. Cao, M.I. Miller, R.L. Winslow, L. Younes, Medical Imaging,
IEEE Transactions on 24 (9), 1216-1230, 2005
Modeling
planar shape variation via Hamiltonian flows of curves, J.
Glaun�s, A. Trouv�, L. Younes, Statistics and analysis of shapes,
335-361, 2006
Diffeomorphic
matching of diffusion tensor images, Y. Cao, M.I. Miller, S.
Mori, R.L. Winslow, L. Younes, Computer Vision and Pattern
Recognition Workshop, 2006. CVPRW'06. Conference on, 2006
Large
deformation diffeomorphic metric curve mapping, J. Glaun�s,
A. Qiu, M.I. Miller, L. Younes, International journal of computer
vision 80 (3), 317-336, 2008
A
kernel class allowing for fast computations in shape spaces
induced by diffeomorphisms, A. Jain, L. Younes, Journal of
Computational and Applied Mathematics, 2012
Diffeomorphometry
and geodesic positioning systems for human anatomy, MI
Miller, L Younes, A Trouv�, Technology 2 (01), 36-43
Beyond the registration problem, which is addressed in
the previous papers, additional issues can be raised, and
refinements can be brought via the rich structure brought by the
Riemannian submersion $\pi$. The optimality equation, which has the
same structure as the one discovered by Arnold, was presented in
relation with shape analysis and computational anatomy in
Geodesic
shooting for computational anatomy, M.I. Miller, A. Trouv�, L.
Younes, Journal of mathematical imaging and vision 24 (2), 209-228,
2006.
Geodesic
shooting and diffeomorphic matching via textured meshes, S.
Allassonni�re, A. Trouv�, L. Younes, Energy Minimization Methods in
Computer Vision and Pattern Recognition, 365-381, 2005
Soliton dynamics in computational anatomy, D.D. Holm, J. Tilak
Ratnanather, A. Trouv�, L. Younes, NeuroImage 23, S170-S178, 2004
Further developments around this equation, and the important
problem of transport of vectors or covectors along geodesics is
addressed in the following papers, which, among other things,
provide equations for parallel and coadjoint
transport.
Jacobi
fields in groups of diffeomorphisms and applications, L.
Younes, Quarterly of applied mathematics 65 (1), 113-134, 2007
Transport
of relational structures in groups of diffeomorphisms, L.
Younes, A. Qiu, R.L. Winslow, M.I. Miller, Journal of mathematical
imaging and vision 32 (1), 41-56
Evolutions
equations in computational anatomy, L. Younes, F. Arrate,
M.I. Miller, NeuroImage 45 (1), S40-S50, 2009
An algorithm dedicated to the problem of averaging over
collections of shapes within a Bayesian context is introduced in:
A
bayesian generative model for surface template estimation, J.
Ma, M.I. Miller, L. Younes, Journal of Biomedical Imaging 2010, 16,
2010
Bayesian
template estimation in computational anatomy, J. Ma, M.I.
Miller, A. Trouv�, L. Younes, NeuroImage 42 (1), 252-261, 2008
This approach can be completed with principal component analysis,
as studied in:
Statistics
on diffeomorphisms via tangent space representations, M.
Vaillant, M.I .Miller, L. Younes, A. Trouv�, NeuroImage 23,
S161-S169, 2004
Principal
component based diffeomorphic surface mapping, A. Qiu, L.
Younes, M.I. Miller, Medical Imaging, IEEE Transactions on 31 (2),
302-311, 2012
Robust
Diffeomorphic Mapping via Geodesically Controlled Active Shapes,
D. Tward, J. Ma, M. Miller, L. Younes, International journal of
biomedical imaging, 2013
The LDDMM optimal control problem has interesting
developments when additional constraints are applied to the
evolving diffeomorphism. Some examples, with applications to curve
and surface matching, are developed in
Constrained
Diffeomorphic Shape Evolution, L. Younes, Foundations of
Computational Mathematics 12 (3), 295-325, 2012
Gaussian
diffeons for surface and image matching within a Lagrangian
framework, L. Younes, Geometry, Imaging and Computing, 1 (1)
pp. 141-171,
and more recently, a comprehensive and general discussion of the
constrained setting has been developed in
Shape deformation
analysis from the optimal control viewpoint, S Arguillere, E
Tr�lat, A Trouv�, L Younes, arXiv preprint arXiv:1401.0661
The diffeomorphic mapping approach has also been applied to
surface evolution (introducing area-minimizing diffeomorphic
flows), segmentation (diffeomorphic active contours) and tracking.
Diffeomorphic
surface flows: A novel method of surface evolution, S.
Zhang, L. Younes, J. Zweck, J.T. Ratnanather, SIAM journal on
applied mathematics 68 (3), 806-824, 2008
Diffeomorphic
active contours, F. Arrate, J.T. Ratnanather, L. Younes,
SIAM journal on imaging sciences 3 (2), 176-198, 2012
Modeling
and Estimation of Shape Deformation for Topology-Preserving
Object Tracking, V Staneva, L Younes, SIAM Journal on
Imaging Sciences 7 (1), 427-455